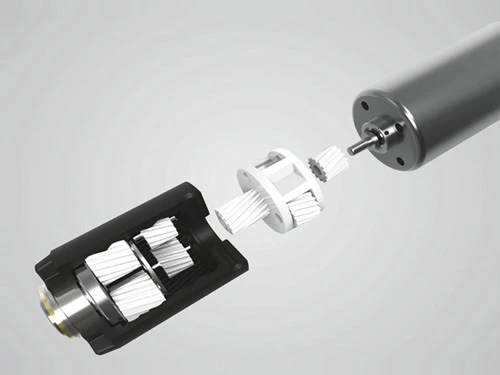
Robot dişli motoru, akıllı robot için kullanılan dişli kutusu ve mini robot motorunun birleşimidir. Tahrik motoru (mikro motor) ve redüktörden (redüktör) oluşan bir redüksiyon şanzıman sistemidir. Mini robot motoru, robotun hareket etmesini ve yürümesini sağlayabilen robot motor torkunu yavaşlatma ve artırma işlevine sahiptir. Örneğin, bir DC fırçalı motor, bir servo motor, bir step motor sürücü kaynağı olarak kullanılabilir ve bir enkoder de takılabilir. Redüktör olarak planet dişli kutusu, plastik dişli kutusu veya metal dişli kutusu, sonsuz dişli kutusu, paralel milli dişli kutusu, silindirik dişli kutusu kullanılabilir. Çıkış gücü, çıkış hızı, redüksiyon oranı, çıkış torku, anma gerilimi, çaplar, şanzıman yapısı, şanzıman gürültüsü, şanzıman doğruluğu, çalışma sıcaklığı gibi parametreler özel olarak geliştirilmiştir. ZHAOWEI Machinery & Electronics Co., Ltd, akıllı robot için özelleştirilmiş teknik parametrelerle (çap: 3.4mm-38mm, voltaj: 24V altında, çıkış gücü: 50W altında, çıkış hızı: 5rpm) dişli motor geliştirme ve üretim tahrik sistemleri sağlamayı taahhüt eder. 2000rpm, dişli oranı: 5-1500). Çıkış torku: 1.0 gf.cm -50kgf.cm. Şanzıman boşluğu 1-2 ark dakika içinde ve dişli şanzıman gürültüsü 45dB'nin altında.
Robot Dişli Motorunun Parametreleri:
| Malzeme | Metal |
|---|---|
| Dış çap | 38mm |
| Çalışma sıcaklığı | -30℃~+100℃ |
| dönme yönü | cw&ccw |
| Dişli boşluğu | ≤2° |
| Voltaj (Opsiyonel) | 3V~24V |
| Rulman | Gözenekli yatak/Rulman |
| giriş hızı | ≤15000rpm |
| eksenel oyun | ≤0.1mm/≤0.1mm |
| Akım | 300mA maks |
| Çıkış milinde radyal yük | ≤120N/≤180N |
| Motorlar (Opsiyonel) | Step/DC/Servo Motor |
özelleştirme
Proje Adı: Robot Tekerlekli Motor
Proje Geçmişi: Robotlar, hareket moduna göre tekerlek tipi, bacak tipi, paletli tip, yılan tipi ve bileşik tip olarak ayrılmaktadır. Bunlar arasında tekerlekli robotlar, otonom mobil robotlar alanında nispeten önemli bir yere sahiptir. Hızlı hareket ve basit kontrol özelliklerine sahiptirler ve otomatik paletleme üretim hatlarında, insansız araçlarda ve diğer alanlarda yaygın olarak kullanılırlar.
Teknik Başarı: Tekerlekli robotun sürüş kısmı, anti-simetrik kurulum yöntemiyle bir DC motor ve 38 mm'lik bir planet dişli kutusunun bir kombinasyonunu benimser. (Robot tekerlekleri için step motor da yaygın bir tiptir.) Bu yöntem, redüktörün çıkış milinin kuvvetini azaltabilir, dingil mesafesini büyük ölçüde kısaltabilir ve tekerlek takımının koaksiyel olması ve büyük güce ihtiyaç duyulması durumunda yerden tasarruf sağlayabilir. (Genellikle motor boyutu ve gücü belli bir orandadır). Bu sayede robot tekerlek motorunun boyutu küçük olabilir.