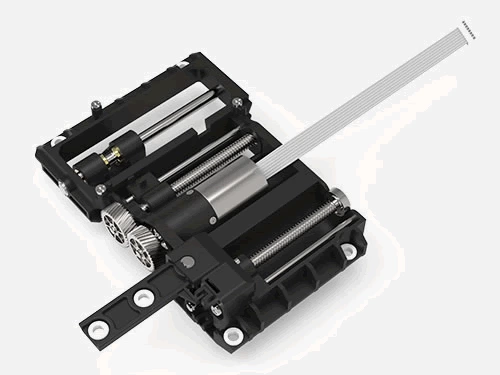
Robot köpek motoru, akıllı robot köpek ortak tahriki için kullanılan bir mikro dişli motor şanzıman sistemidir. Ana şanzıman yapısı, tahrik motoru (mikro motor) ve dişli kutusundan (redüktör) oluşur. Robot köpek eklem motoru, robot köpeğini uyarlanabilir bir şekilde yürümeye yönlendirebilir. Robot köpeğin yamaçlara tırmanmasını ve çakıllı yolda yürümesini sağlar. Düz olmayan bir terasta yürürken ileri, geri, yukarı, aşağı hareket, yalpa açısı, yunuslama açısı ve yuvarlanma açısı kontrol edilebilir. Çıkış gücü, çıkış torku, gürültü, hassasiyet, dişli kutusu iletim modu, tahrik motoru performansı gibi bu tür teknik parametrelerin özelleştirilmesi gerekir. ZHAOWEI Machinery & Electronics Co., Ltd, kapsamlı bir kişiselleştirme hizmeti sunmayı taahhüt eder.
Robot Köpek Motorunun Parametreleri:
| Malzeme | Metal |
|---|---|
| Dış çap | 24mm |
| Çalışma sıcaklığı | -20℃~+100℃ |
| dönme yönü | cw&ccw |
| Dişli boşluğu | ≤3° |
| Voltaj (Opsiyonel) | 3V~24V |
| Rulman | Gözenekli yatak/Rulman |
| giriş hızı | ≤15000rpm |
| eksenel oyun | ≤0.3mm/≤0.2mm |
| Akım | 300mA maks |
| Çıkış milinde radyal yük | ≤120N/≤170N |
| Motorlar (Opsiyonel) | Step/DC Motor |
özelleştirme

Proje Adı: Robot Ortak Motor
Proje Arka Planı: Hızlı tepki etkileşimi ve iletişimde, robot için dişli dc motor, büyük bir güç-kütle oranı ve tork-atalet oranı, yüksek başlangıç torku, düşük gerektiren robot eklemlerini sürmek için kullanılır. atalet ve geniş ve pürüzsüz bir hız ayar aralığı. Özellikle robotik kavrayıcı, küçük hacimli ve kütleli ve kısa sürede büyük aşırı yük kapasitesine sahip bir robot motoru kullanmalıdır.
Başarı: Robot, robotun kalitesini ve verimliliğini büyük ölçüde artırabilen ZHAOWEI planet robot servo motorla birleştirilmiştir. Robot için dişli DC motor, iki aşamalı, üç aşamalı ve dört aşamalı şanzıman değişikliklerine sahiptir. Redüktörün redüksiyon oranı, giriş hızı ve torku robot motorunun tasarım gereksinimlerine göre ayarlanabilir.